Previously the legs have been made manually in a variety of ways: cut out of polyethylene boards, soldered together using steel rods and laser cut out of MDF. A couple of examples are shown in the photo below:
The leg sub-assembly has been redesigned to be 3D printed.
The right leg was 3D modelled:
The design followed on from that developed on the manual version.
The leg, motor and claw assembly model is shown below:
The leg was 3D printed in grey PLA (0.15mm resolution):
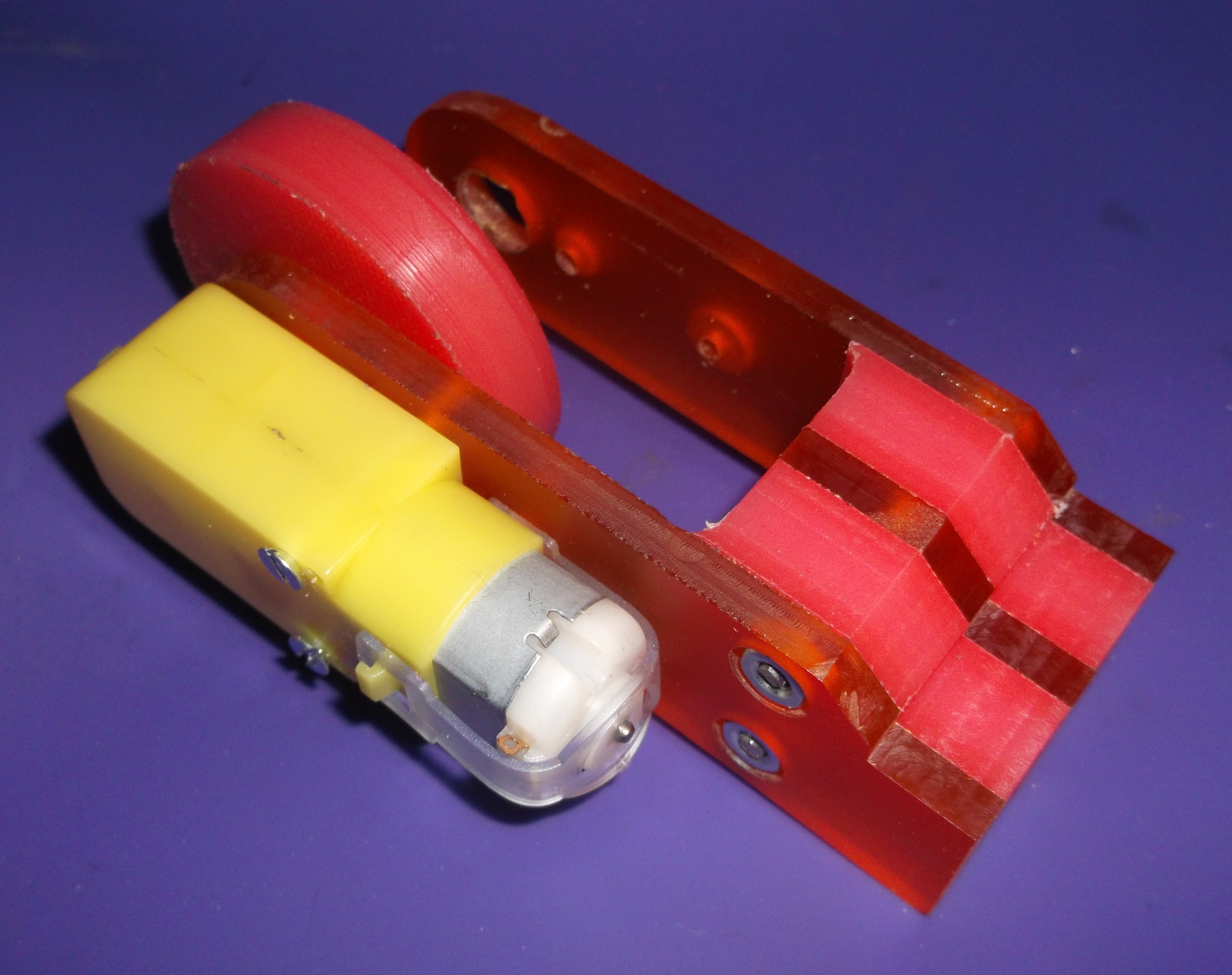
Some other parts of the leg sub-assembly were printed and are shown below along with the 200:1 motor/gearbox:
The long round spigot attaches to the rectangular motor spindle:
The motor and spindle attached to the leg:
The motor clamp was attached (nb: screws need trimming).
This worked but was later modified as shown below.
This post is about the process of starting to create the tail.
I found with previous versions that having a long-ish tail was quite effective in terms of balancing the rest of the model when it’s moving. Having a slight bend or kink near the front make it appear less dog like perhaps(?). I also noticed that actual dinosaur tails are wide at the base so that’s what I have tried to go for. I decided to have a triangular space-frame style structure.
The new, ‘push-me-pull-you’ drive is shown in the image below, with one crank mechanism below and another on top, both working together to drive the head and neck biting mechanism. This post shows how this was achieved.
After making the new drive and mounting it on the top (see pic below) I decided that the easiest way to have a drive above and below would be to relocate it on the underside and then make another one for the top side.
New crank drive, topside:
The above crank slung underneath:
The next step was to make a new crank drive with the same design and to mount it above the first.
An housing was made using acrylic plastic sheet, 5mm thick and using 10mm thick low-density polyethylene spacers.
As previously, crank wheels with simple slip clutches were made and added to each side:
The drive was then attached.
A video of the two drives working together is shown below.
The con-rod used for the top crank drive was quickly made from a length of aluminium round bar which was been bent to shape and flattened at both ends.
Other versions were made using flat aluminium bar and also 5mm thick acrylic sheet.
The acrylic version was used as it helps keep the crank wheels aligned as shown below.
After making the new drive and mounting it on the top (see link above) I decided it would be easier to relocate it on the underside and then make another one for the top side (besides it was the wrong colour!)
The notes, photos & videos below show how this was achieved.
The lower space frame and rear legs were first removed.
The new crank drive was then removed from the top and slung underneath (with a few small modifications).
The photo above shows a simple crank con-rod made from aluminum flat bar but a more complex version was needed, as shown below.
The crank was wired up and the space frame undercarriage re-attatched.
(*But see the next post -this topside drive is later slung underneath).
The following notes describe how this was made and there is a video at the end.
One of the overriding principles of this project has been that it should be possible to build a fighting robot dinosaur at minimum cost. So a key feature has been the use of parts from economy cordless drills. A cordless drill has a powerful motor, a gearbox, a clutch, quite often has dual speed control and the casing can be used as the control consol (e.g., making use of the trigger). And all this for £10 to £15! (for example: B & Q).
The red version looked like this with the drill motor-gearbox-clutch crank system…
There are a couple of drawbacks however to using the components of a cordless drill. One is that the gears do wear out -or more often than not the smaller red gears eventually split.
The other and main problem is that it’s hard to remove the chuck from the drill. This is usually held in place with a left-hand M5 machine screw and the easiest method to remove it is using an impact tool as shown below. But the bits that come with impact tools aren’t long enough. I had to make a special-purpose attachment.
So the plan is to come up with an easier alternative. One possible solution is to use the same low-cost 200:1 motor/gearboxes that are used to rotate the claws. I have used these before, coupled to a crank wheel with a simple slip clutch (i.e., similar to the claws design).
A single crank/motor arrangement worked well with the ‘baby’ version.
I tried two together on a full size version (one above, one below) but it felt a bit underpowered. I think there needs to be four working together to have the same kind of power as the cordless drill motor.
The plan therefore was to combine them in pairs, each with a crankwheel and con-rod and to have one pair above the ‘main body base’ (‘i.e., topside’) and one slung beneath.
The first step was to make the crank wheel (with slip-clutch) and mount on the motor-gearbox shaft.
Two were then combined and a piece of flat acrylic used as the beginnings of the con-rod. This is then the basic drive unit. I have used sections of 5mm thick acrylic sheet and blocks of LDPE. the con-rod is made of acrylic.
The cordless drill motor and crank etc was then removed from the red version.
The new crank drive was attached along with a shaped con-rod.
The crank drive housing was then shaped to look a little less square.
The finished drive unit.
The drive was attached.
And wired up.
The red version now looks like this:
Video below: it’s a bit underpowered but I expected that, it will be quite good when all four motors are working (it falls over at the end!).
In a previous post (here) the head and jaws and the horizontal neck section of the wireframe version were replaced with laser-cut mdf parts. This post is about rebuilding the vertical neck section to accommodate the changes.
The wireframe head and neck previously looked like this:
The new head/jaws and horizontal neck looks like this:
The two pairs of aluminium bars of the vertical neck section were each bent to shape to support the narrower mdf parts.
The front bars were attached:
Ande the rear bars were also attached.
A length of M4 studded rod was bent to shape and attached to the upper (moving) jaw, through a slot in the lower jaw to allow the jaw mechanism to function.
It was found that the new head and neck made it front-heavy, so a much longer and more flexible tail was attached…
The original ‘Robokiller’ featured a kind of flatpack design (easy to cut out) which is why I ended up using low density polyethylene boards. The legs were left rectangular-looking (i.e., not shaped to look more leg-like) so that it would be easy to modify them later to incorporate hinges. The hinge would allow the legs to fold when ‘injured’ -more on that in subsequent posts.
This post is about making a simple modification to the front legs and claws.
The shape of the legs was altered and larger claws were made (each with simple slip clutches).
In the image above the right front leg and claw have been altered.
The photos below shows both legs and claws altered.
The new claws can be seen in action below.
More later : the front legs will be modified to enable ‘injuring’ during fights….
When complete the red version looked like this with the lower wire space frame attached:
The red version was the first to be made using low density polyethylene board.
A high-density polyethylene (HDPE) version was made before this, which was the first to feature the present basic design but the HDPE was much denser and too heavy.
At some point I made a kind of spaceframe cover using gas welding rod and wire, soldered together.
The objective here was to create a similar space frame for the underside which would also function as the rear legs.
An under belly was made and slung beneath the main body.
The welding rod sections are joined by wrapping them in steel wire and soldering.
The next step was to modify the LDPE leg and attach it with rods to the main body.
From then on the space frame was built up and the spaces between the wire struts was filled-in with a kind of lattice structure using wire.
This process was then repeated on the left side.
The whole structure was then removed and painted.
The claws were attached.
This assembly was then reattached.
The result:
Nb: a larger rear claw (with slip-clutch) has also been attached.
The next task is to modify the front leg and claw…
An important feature of this project has been to create something that could be made inexpensively. With that in mind most of the main non-powered components have been cut out of low density polyethylene boards (actually commercial cutting boards for kitchens). An attempt was made to try a different tack and to create a space-frame using gas welding rod. The rods are joined using wire and solder. This worked well but it was felt that the neck was a bit wide and clunky-looking and the head a bit crude.
The plan here is to improve the design.
The first step was to remake the head and jaws.
I like the shape of the head: it looks viper-ish but it’s a bit crude as it relies on reptile-skin effect fabric and Polymorph teeth.
A while ago I had some parts laser cut out of mdf (I had wanted to remain using low-density polyethylene but this can’t be laser-cut). The plan was thus to use some of these parts and rework the design.
I have found that joke vampire teeth can look quite effective….
The first task was therefore to attach these to the jaws.
It can be quite tricky to attach the jaws in a way that in unobtrusive. So I made a brief attempt to use the joke jaws as a cast to create jaws using dental polymer with M3 screws embedded to secure them with.
This worked but the results weren’t as good as I had hoped so I decided to revert to just using the joke teeth.
So I needed to find a better way to attach these (I had previously used msall wood screws but these were a bit too visible.
For the lower jaws I drilled and tapped an M3 hole in the red dental polymer for a countersunk M3 machine screw and used two 10mm nails at the sides.
For the upper jaw I just used three small nails.
The jaws were connected using a small steel hinge.
The jaws were then bolted to the horizontal neck section (also mdf).
The next task is to modify the vertical neck sections.