The new, ‘push-me-pull-you’ drive is shown in the image below, with one crank mechanism below and another on top, both working together to drive the head and neck biting mechanism. This post shows how this was achieved.
After making the new drive and mounting it on the top (see pic below) I decided that the easiest way to have a drive above and below would be to relocate it on the underside and then make another one for the top side.
New crank drive, topside:
The above crank slung underneath:
The next step was to make a new crank drive with the same design and to mount it above the first.
An housing was made using acrylic plastic sheet, 5mm thick and using 10mm thick low-density polyethylene spacers.
As previously, crank wheels with simple slip clutches were made and added to each side:
The drive was then attached.
A video of the two drives working together is shown below.
The con-rod used for the top crank drive was quickly made from a length of aluminium round bar which was been bent to shape and flattened at both ends.
Other versions were made using flat aluminium bar and also 5mm thick acrylic sheet.
The acrylic version was used as it helps keep the crank wheels aligned as shown below.
After making the new drive and mounting it on the top (see link above) I decided it would be easier to relocate it on the underside and then make another one for the top side (besides it was the wrong colour!)
The notes, photos & videos below show how this was achieved.
The lower space frame and rear legs were first removed.
The new crank drive was then removed from the top and slung underneath (with a few small modifications).
The photo above shows a simple crank con-rod made from aluminum flat bar but a more complex version was needed, as shown below.
The crank was wired up and the space frame undercarriage re-attatched.
(*But see the next post -this topside drive is later slung underneath).
The following notes describe how this was made and there is a video at the end.
One of the overriding principles of this project has been that it should be possible to build a fighting robot dinosaur at minimum cost. So a key feature has been the use of parts from economy cordless drills. A cordless drill has a powerful motor, a gearbox, a clutch, quite often has dual speed control and the casing can be used as the control consol (e.g., making use of the trigger). And all this for £10 to £15! (for example: B & Q).
The red version looked like this with the drill motor-gearbox-clutch crank system…
There are a couple of drawbacks however to using the components of a cordless drill. One is that the gears do wear out -or more often than not the smaller red gears eventually split.
The other and main problem is that it’s hard to remove the chuck from the drill. This is usually held in place with a left-hand M5 machine screw and the easiest method to remove it is using an impact tool as shown below. But the bits that come with impact tools aren’t long enough. I had to make a special-purpose attachment.
So the plan is to come up with an easier alternative. One possible solution is to use the same low-cost 200:1 motor/gearboxes that are used to rotate the claws. I have used these before, coupled to a crank wheel with a simple slip clutch (i.e., similar to the claws design).
A single crank/motor arrangement worked well with the ‘baby’ version.
I tried two together on a full size version (one above, one below) but it felt a bit underpowered. I think there needs to be four working together to have the same kind of power as the cordless drill motor.
The plan therefore was to combine them in pairs, each with a crankwheel and con-rod and to have one pair above the ‘main body base’ (‘i.e., topside’) and one slung beneath.
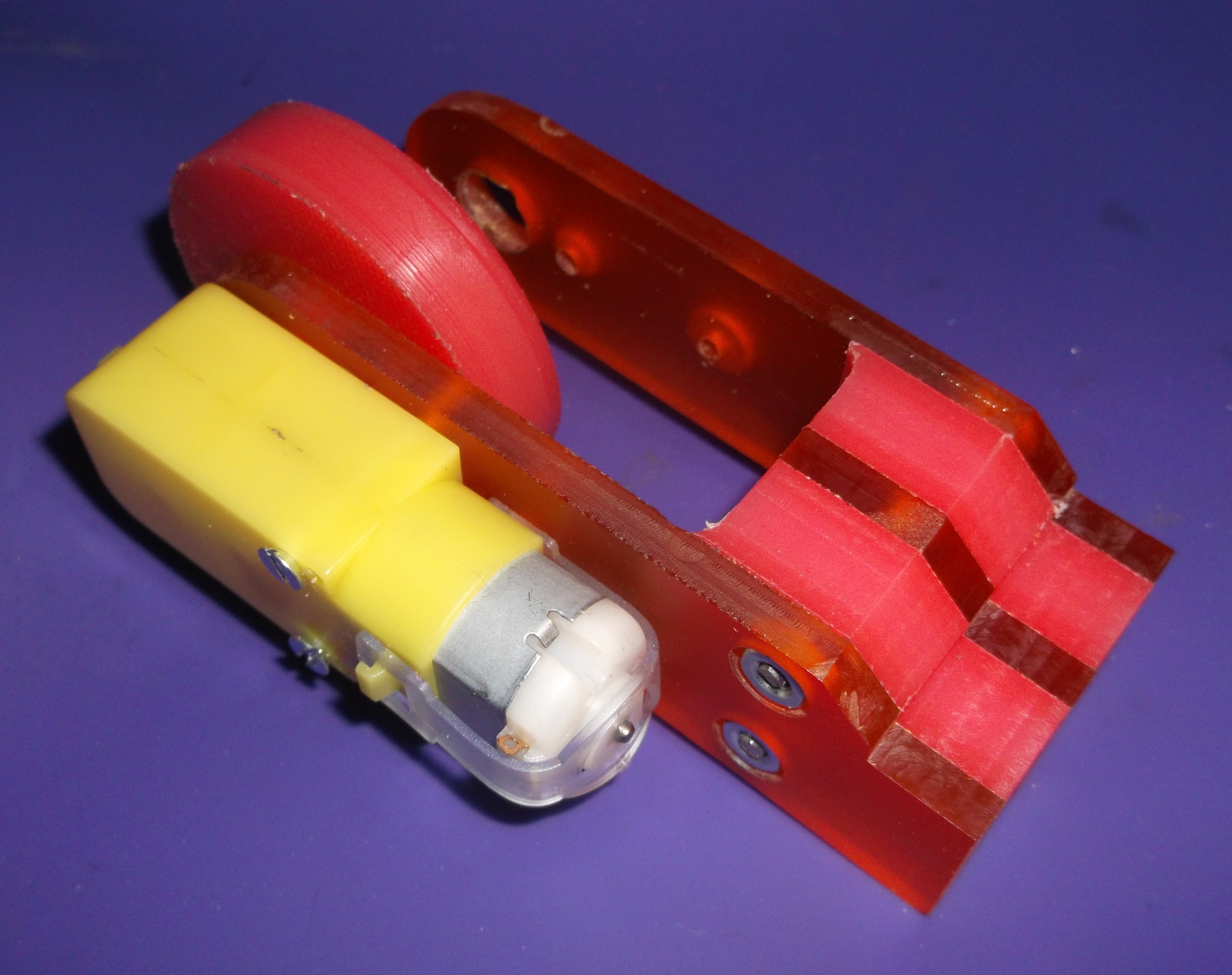
The first step was to make the crank wheel (with slip-clutch) and mount on the motor-gearbox shaft.
Two were then combined and a piece of flat acrylic used as the beginnings of the con-rod. This is then the basic drive unit. I have used sections of 5mm thick acrylic sheet and blocks of LDPE. the con-rod is made of acrylic.
The cordless drill motor and crank etc was then removed from the red version.
The new crank drive was attached along with a shaped con-rod.
The crank drive housing was then shaped to look a little less square.
The finished drive unit.
The drive was attached.
And wired up.
The red version now looks like this:
Video below: it’s a bit underpowered but I expected that, it will be quite good when all four motors are working (it falls over at the end!).
In a previous post (here) the head and jaws and the horizontal neck section of the wireframe version were replaced with laser-cut mdf parts. This post is about rebuilding the vertical neck section to accommodate the changes.
The wireframe head and neck previously looked like this:
The new head/jaws and horizontal neck looks like this:
The two pairs of aluminium bars of the vertical neck section were each bent to shape to support the narrower mdf parts.
The front bars were attached:
Ande the rear bars were also attached.
A length of M4 studded rod was bent to shape and attached to the upper (moving) jaw, through a slot in the lower jaw to allow the jaw mechanism to function.
It was found that the new head and neck made it front-heavy, so a much longer and more flexible tail was attached…
In a previous post (‘Baby’ one: new drive system) a new head/neck drive mechanism was introduced based on a crank wheel design along with a slip-clutch.
This can be seen in action below…..
This was a lot slower than the original worm-and-wheel drive (which had to be abandoned as it chewed up the gears).
The crank wheel and associated parts were removed.
The 200:1 motor and gearbox was removed and replaced with a 120:1 version.
The following video shows the result.
As you can see this is slightly better than the video at the start.
There were a number of things that needed to be done: the whole head/neck assembly tended to point too steeply downwards, the jaws were originally cut out very quickly and were thus a bit rough and the ‘kinked’ neck strut had snapped….The following is a report on how these have been remedied.
The broken kinked strut is shown below.
A new strut was made using welding rod and electical eyelets.
I then made a longer aluminium bar to link the head to the red horizontal neck section with a bend which would make the head agle less steep. I also smothed the rough edges of the black jaws.
Modified head and neck section shown below.
Next task is to replace the 200:1 motor/gearbox that drives the head & neck with a 120:1 version to speed it up.
Modifying the smallest prototype Techno-saurus (the ‘baby’): removing the worm and wheel drive and replacing it with a simple crank with a slip-clutch.
The head and neck lunges backwards and forwards and this causes the mouth to bite as can be seen below.
This is achieved using a worm-and-wheel drive mechanism.
It’s fast and effective but the worm and wheel gears tend to chew themselves up very quickly.
It was decided to use a crank mechanism instead and with a built-in slip clutch similar to that used for the rotating claws.
The first step was to dismantle the above drive system:
Next a motor mounting plate was made:
The 200:1 motor/gearbox was attached beneath this:
The crank spindle was then attached to the motor spindle:
A crank wheel was made with a slot and slip-adjustment clamp that would provide the slip clutch function (and thus protecting the gearbox under excessive loading).
This was then attached to the crank spindle and secured with a split pin. A a crank pin was attached to drive the con-rod (M4 machine screw -actually attached before assembling as shown below).
A connecting rod was made and attached.
The finished crank design…
This can be seen in action below…..
It works but compared to the video at the top of this post it is too slow. This is due to the gearbox ratio being 200:1 which is perfect for the rotating claws but a bit slow for the lunging and biting mechanism. Because it’s slow, there is not the same kind of dynamic effect on the whole device which made it more life-like. I’ll change the motor/gearbox asap.